

在现代控制系统中,服务器的PID(比例积分微分)控制是至关重要的部分,这种控制方式因其精确性和可靠性被广泛应用在多个领域,如自动化制造、机器人技术、无人驾驶车辆和飞行控制系统中,接下来将深入探讨服务器PID运算出来的值及其背后的原理:
1、PID控制原理
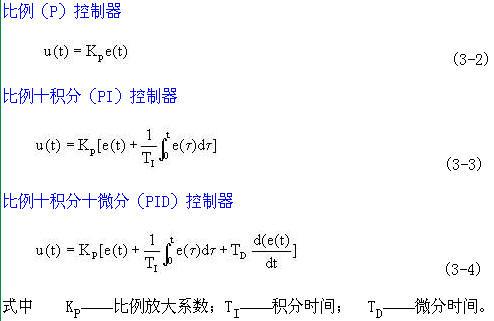
基本概念: PID控制器是一种反馈控制机制,用于确保过程变量(如速度、温度、位置等)保持在设定的目标值,它通过计算设定点与实际过程变量之间的差值(误差),并应用比例、积分和微分操作来调整控制输出,以驱动系统向期望状态靠拢。
比例环节: 比例环节的作用是基于当前误差的大小来调整输出,较大的误差会导致较大的调整,从而快速减小偏差,但仅使用比例控制可能导致系统在达到设定点附近时产生振荡。
积分环节: 积分环节考虑了历史误差,即使当前误差很小,只要累积误差足够大,它仍会进行调整,这有助于消除长期累积的微小偏差,提高系统的稳态精度。
微分环节: 微分环节预测误差的未来趋势,通过对误差变化率的响应,提前进行调节,这样可以抑制可能的过冲和振荡,提高系统的稳定性和响应速度。
2、PID参数调整策略
手动整定: 手动整定通常基于经验或试错法,通过观察系统的响应来逐步调整Kp(比例增益)、Ki(积分增益)和Kd(微分增益)的值。

自动整定: 自动整定方法包括使用软件工具进行自动计算或采用优化算法来寻找最优参数设置,这些方法可以节省时间并提高系统性能。
3、PID控制的应用实例
电机控制: 在电机控制中,PID控制器可用于调节电机的速度和位置,确保其按预期运行,这对于自动化生产线和机器人臂的定位非常关键。
温度控制: 在加热和冷却系统中,PID控制器能够准确控制温度,防止过热或过冷,广泛应用于化工、食品加工等领域。
4、PID控制器的局限性与挑战
非线性系统的挑战: 对于非线性或时变系统,标准的PID控制可能难以达到理想效果,可能需要更复杂的控制策略或改进的PID算法。
鲁棒性问题: 虽然PID控制器通常稳定且可靠,但在面对极端条件或大规模系统时,可能需要进一步优化以提高其鲁棒性。

服务器PID运算的值是根据设定的目标和实际输出之间的偏差,通过比例、积分、微分三个环节的综合运算得出的,该值决定了执行机构如何调整其行为以更接近设定目标,理解PID控制器的工作原理及其在各种应用中的具体表现,有助于更好地设计和优化自动控制系统,以满足不断增长的技术和工业需求。
原创文章,作者:未希,如若转载,请注明出处:https://www.kdun.com/ask/862370.html
本网站发布或转载的文章及图片均来自网络,其原创性以及文中表达的观点和判断不代表本网站。如有问题,请联系客服处理。

发表回复