


多传感器融合的核心算法是实现现代智能系统的重要组成部分,特别是在自动驾驶、机器人技术、智能制造等领域发挥着至关重要的作用,多传感器融合技术通过结合来自不同源的信息,提高系统决策的准确性和可靠性,本文将详细介绍其核心算法的功能与实现方式。

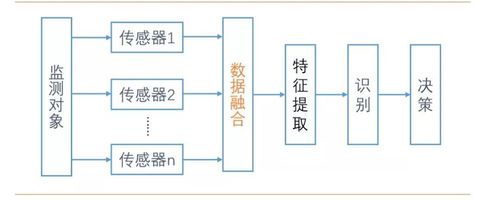
多传感器融合技术的定义是将多个传感器的数据资源进行综合分析,以消除信息间的冗余和矛盾,获得对象的一致性描述,这一过程不仅提高了系统的反应速度和准确性,还增强了信息的充分性,基本原理类似于人脑处理信息的方式,即通过对各传感器信息的多层次、多空间优化组合,产生对环境的一致性解释,在这一过程中,充分利用多源数据是非常重要的。
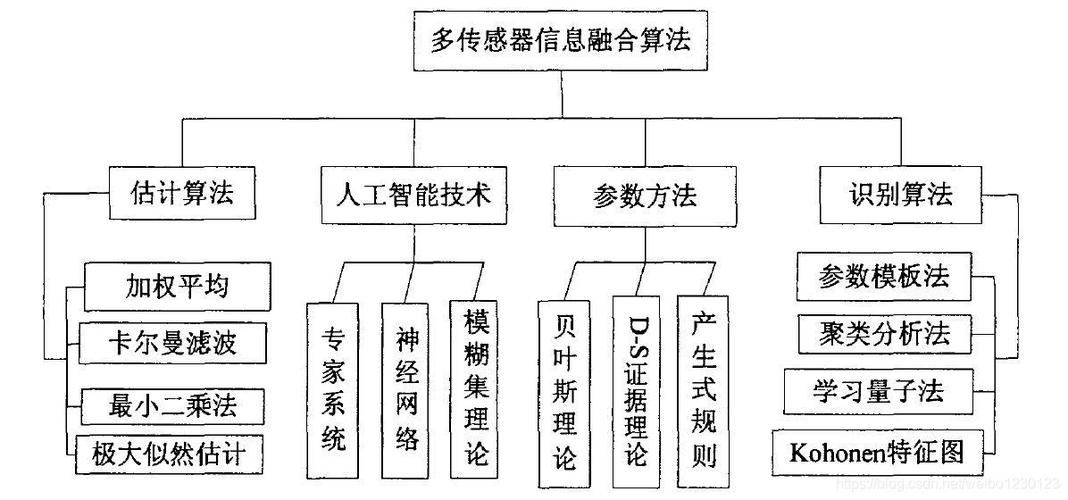
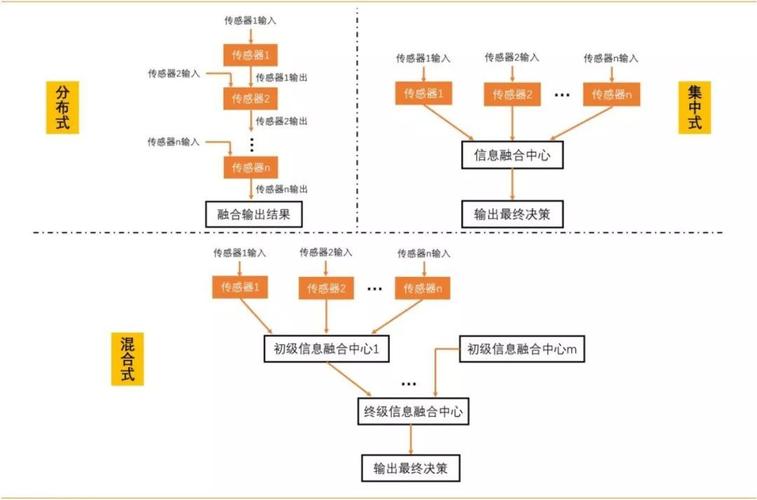
多传感器融合的核心技术可以大致分为两类:强融合和弱融合,其中强融合进一步细分为早期融合、深度融合、后期融合和非对称融合,每种技术有其独特的应用场景和优势,早期融合直接在数据获取阶段就将信息进行整合,而后期融合则在数据处理的最后阶段才整合各传感器的信息。
在自动驾驶感知任务中,多模态融合方法的应用尤为突出,自动驾驶车辆通常配备有多种传感器,如摄像头(Camera)、激光雷达、惯性测量单元(IMU)、毫米波雷达等,这些传感器各自拥有独特的数据获取能力,如摄像头擅长捕捉颜色和形状信息,而激光雷达则在距离和速度测量上表现更优,通过多传感器融合技术,可以有效地将这些信息综合起来,提供更为准确和可靠的环境感知结果。
多传感器融合技术在实际应用中表现出极高的灵活性和广泛性,它不仅限于自动驾驶领域,同样适用于无人机导航、智能监控、工业自动化等多个领域,在这些应用中,多传感器融合技术能够显著提升系统的整体性能,比如提高定位精度、优化路径规划、增强障碍物检测等功能。
多传感器融合技术面临的挑战主要包括如何处理大量数据、如何保证实时性以及如何优化算法的效率等,尽管存在这些挑战,但随着计算能力的提升和算法的不断优化,这些问题正逐步被解决。
多传感器融合的核心算法通过整合来自不同传感器的数据,极大地提升了数据处理的质量和效率,这种技术不仅提高了系统决策的准确性,还增强了系统的可靠性和稳定性,随着技术的进一步发展和应用的拓展,多传感器融合将在未来的智能系统中扮演更加重要的角色。
相关问答 FAQs
Q1: 多传感器融合的主要挑战是什么?
A1: 主要挑战包括大数据处理、实时性保证、以及算法效率的优化,随着硬件性能的提升和算法的进步,这些挑战正在逐渐被克服。
Q2: 多传感器融合技术未来发展趋势如何?
A2: 预计未来多传感器融合技术将更加智能化和自动化,应用领域将进一步扩展至智慧城市、远程医疗等新兴领域,同时算法也将更加高效和精准。
原创文章,作者:未希,如若转载,请注明出处:https://www.kdun.com/ask/827951.html
本网站发布或转载的文章及图片均来自网络,其原创性以及文中表达的观点和判断不代表本网站。如有问题,请联系客服处理。
发表回复