


多传感器融合的核心算法是自动驾驶、机器人技术以及多个智能系统中至关重要的组成部分,通过整合来自不同传感器的数据,这些系统能够更可靠、准确地感知和理解环境,下面将详细介绍多传感器融合核心算法的功能,并采用小标题和单元表格的形式进行结构化呈现:
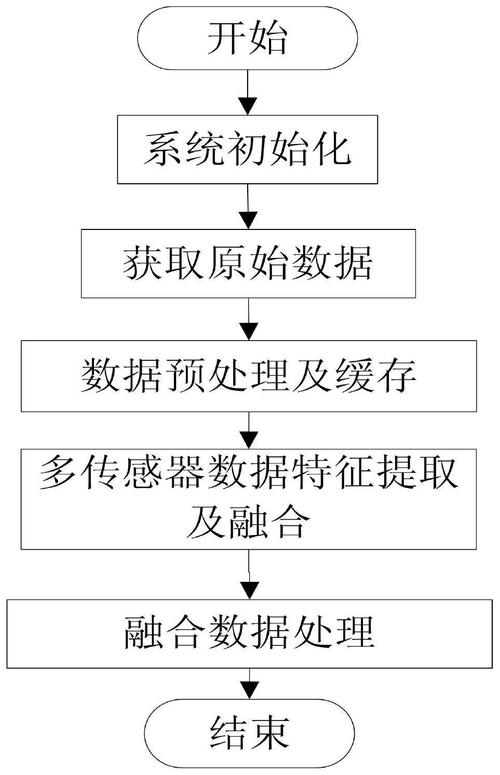

1、基本原理
定义与目的:多传感器融合是通过计算机技术分析和综合不同传感器的信息,以增强决策和估计的准确性。
处理过程:该技术模拟人脑处理信息的方式,整合各种感官数据来提高对环境的感知能力。
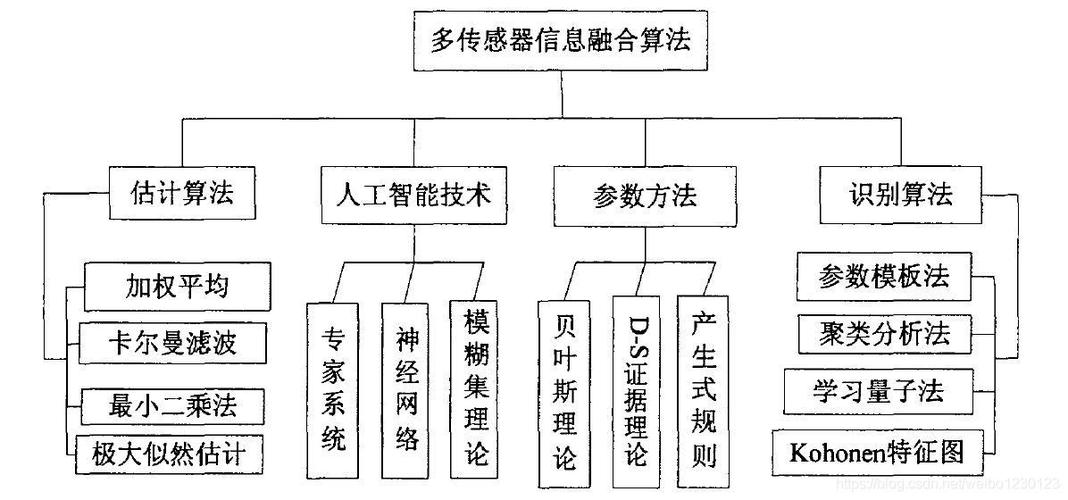
2、融合方法分类
强融合与弱融合:多传感器融合方法可分为强融合和弱融合两大类,其中强融合进一步分为早期融合、深度融合、后期融合和不对称融合四个小类。
3、功能详解
提高准确性:结合多种传感器数据,如摄像头和雷达,可以减少单一传感器的误差和限制。
增强可靠性:在某一传感器失效时,系统仍能通过其他传感器继续运行。
提升环境感知:整合不同传感器的优势,如雷达的距离测量和摄像头的图像识别,实现全方位的环境感知。
4、应用场景
自动驾驶技术:传感器融合为自动驾驶车辆提供了对周围环境准确的感知能力,是实现自动驾驶的核心技术之一。
机器人技术:在机器人导航、物体识别等任务中,通过融合多种传感器信息提升机器人的感知和操作能力。
多传感器融合的核心算法通过整合来自不同传感器的数据,极大地提升了系统对环境的感知能力,提高了决策的准确性和可靠性,这种技术不仅在自动驾驶领域发挥着关键作用,也在监控、医疗、环境监测等多个领域展现了广泛的应用潜力,随着技术的进一步发展,未来多传感器融合算法将更加智能和高效,为智能化系统的实现提供更多可能。

| 算法名称 | 功能介绍 |
| 卡尔曼滤波(Kalman Filter) | 利用统计方法估计线性动态系统的状态,适用于多传感器数据融合中的连续时间序列数据的处理,能够对传感器的噪声进行有效抑制。 |
| 扩展卡尔曼滤波(EKF) | 针对非线性系统,对卡尔曼滤波进行扩展,适用于处理传感器数据融合中的非线性问题,能够提供更准确的状态估计。 |
| 无迹卡尔曼滤波(UKF) | 类似于EKF,但采用无损变换(UT)来更好地近似非线性函数,提高了对非线性系统的状态估计精度。 |
| 粒子滤波(Particle Filter) | 通过一组有限数量的随机样本(粒子)来表示概率分布,特别适用于非线性、非高斯系统的状态估计,能够处理传感器融合中的不确定性问题。 |
| 多传感器数据加权融合 | 通过为不同传感器分配权重,对各个传感器的数据进行加权平均,减少单个传感器的不确定性,提高整体融合结果的准确性和可靠性。 |
| 紧耦合算法 | 先对传感器的原始数据进行融合处理,再进行集中式计算,适用于要求高精度和高稳定性的自动驾驶定位系统。 |
| 松耦合算法 | 对传感器处理后的结果进行融合,适用于对实时性要求较高的场合,降低了算法的复杂度,但精度相对紧耦合算法有所降低。 |
| 目标级融合 | 在各个传感器数据已经处理并生成高层次目标检测结果后进行融合,主要用于提高目标识别和跟踪的准确率。 |
| 最优比例权重融合 | 在加权融合的基础上,引入最优比例权重概念,通过二次加权的方式优化权重的分配,提高融合效果。 |
这个介绍概括了一些常用的多传感器融合算法及其功能,不同的算法根据实际应用场景和需求进行选择。
原创文章,作者:未希,如若转载,请注明出处:https://www.kdun.com/ask/712457.html
 微信扫一扫
微信扫一扫