

ABB机器人编程实例一:基本运动控制

1、准备工作
确保ABB机器人已正确安装并连接到计算机。
安装ABB机器人编程软件(如RobotStudio)。
准备一个ABB机器人控制器和示教器。
2、创建新项目
打开RobotStudio软件,点击“文件”>“新建”>“项目”。
输入项目名称,选择机器人型号,点击“确定”。
3、导入模型
在项目中,点击“文件”>“导入”>“从CAD模型导入”。
选择机器人的CAD模型文件,点击“打开”。
4、添加程序
在项目中,点击“文件”>“新建”>“程序”。
输入程序名称,点击“确定”。
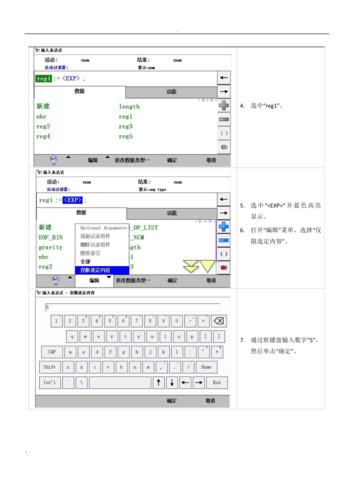
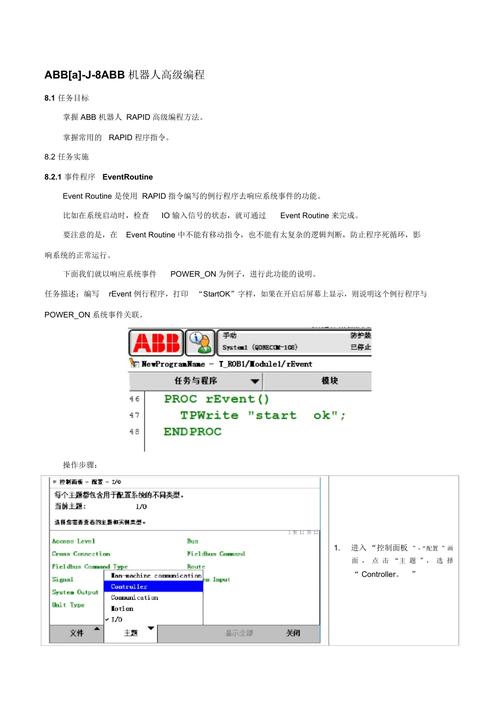
5、编写程序
在程序编辑器中,编写机器人的基本运动控制代码,实现机器人的关节运动、直线运动等。
6、编译程序
在程序编辑器中,点击“编译”按钮,检查程序是否有语法错误。
如果程序没有错误,点击“保存”按钮。
7、下载程序到机器人控制器
将ABB机器人控制器连接到计算机。
在RobotStudio软件中,点击“工具”>“控制器”>“连接”。
选择机器人控制器型号,点击“连接”。
在程序编辑器中,点击“下载”按钮,将程序下载到机器人控制器。
8、运行程序
使用ABB机器人示教器,启动机器人控制器。
在示教器上,选择刚刚下载的程序,点击“运行”。
观察机器人的运动情况,确保程序正确运行。
9、调试程序
如果程序运行出现问题,可以在RobotStudio软件中修改程序代码。
修改完成后,重新编译、下载和运行程序,直到满足要求。
以下是将“ABB机器人编程实例一 _编程实例”写成介绍的一个示例,请注意,由于我无法知道具体的编程实例内容,我将假设介绍是基于一个通用的ABB机器人编程实例,包括常见的编程步骤、指令和目的。
| 序号 | 编程步骤 | 指令/代码示例 | 目的/功能描述 |
| 1 | 初始化 | InitializationSystem() | 初始化机器人系统,准备编程 |
| 2 | 设置工具坐标系 | SetTool(data) | 定义工具坐标系,data包含工具参数 |
| 3 | 设置工件坐标系 | SetWobj(data) | 定义工件坐标系,data包含工件参数 |
| 4 | 移动至起始位置 | MoveJ(pose, speed, acceleration) | 将机器人移动到预定的起始位置 |
| 5 | 执行动作1 | Arc_CCW(pose1, pose2, speed) | 沿逆时针方向从pose1到pose2执行圆弧运动 |
| 6 | 等待 | Wait(time) | 等待指定的时间time |
| 7 | 执行动作2 | MoveL(pose, speed, zone) | 从当前位置直线移动到指定pose |
| 8 | I/O操作 | SetDO(output, value) | 设置数字输出output的状态为value |
| 9 | 循环执行 | Loop | 开始循环,重复一系列动作 |
| 10 | 结束循环 | EndLoop | 结束循环,继续程序执行 |
| 11 | 返回原点 | MoveJ(home, speed, acceleration) | 将机器人返回到原点位置 |
| 12 | 结束程序 | End() | 结束程序,停止执行 |
请根据您的具体编程实例修改上表中的指令、参数和功能描述,这个介绍只是一个框架,用于展示如何将ABB机器人编程步骤和实例组织成介绍形式。
原创文章,作者:未希,如若转载,请注明出处:https://www.kdun.com/ask/698679.html
本网站发布或转载的文章及图片均来自网络,其原创性以及文中表达的观点和判断不代表本网站。如有问题,请联系客服处理。
发表回复